Finden Sie den Abstand zwischen 2 Punkten. Der Abstand zwischen zwei Punkten. Analytische Geometrie im Flugzeug
Gegeben sei ein rechtwinkliges Koordinatensystem.
Satz 1.1. Für zwei beliebige Punkte M 1 (x 1;y 1) und M 2 (x 2;y 2) der Ebene wird der Abstand d zwischen ihnen durch die Formel ausgedrückt
Nachweisen. Lassen Sie uns die Senkrechten M 1 B und M 2 A von den Punkten M 1 bzw. M 2 fallen lassen
 auf der Oy- und Ox-Achse und bezeichnen mit K den Schnittpunkt der Geraden M 1 B und M 2 A (Abb. 1.4). Möglich folgende Fälle:
auf der Oy- und Ox-Achse und bezeichnen mit K den Schnittpunkt der Geraden M 1 B und M 2 A (Abb. 1.4). Möglich folgende Fälle:
1) Die Punkte M 1, M 2 und K sind unterschiedlich. Offensichtlich hat Punkt K Koordinaten (x 2;y 1). Es ist leicht zu erkennen, dass M 1 K = ôx 2 – x 1 ô, M 2 K = ôу 2 – y 1 ô. Weil ∆M 1 KM 2 ist rechteckig, dann ist nach dem Satz des Pythagoras d = M 1 M 2 =  = .
= .
2) Punkt K fällt mit Punkt M 2 zusammen, unterscheidet sich jedoch von Punkt M 1 (Abb. 1.5). In diesem Fall ist y 2 = y 1
 und d = M 1 M 2 = M 1 K = ôx 2 – x 1 ô=
und d = M 1 M 2 = M 1 K = ôx 2 – x 1 ô=  =
=
3) Punkt K fällt mit Punkt M 1 zusammen, unterscheidet sich jedoch von Punkt M 2. In diesem Fall x 2 = x 1 und d =
M 1 M 2 = KM 2 = ôу 2 - y 1 ô=  = .
= .
4) Punkt M 2 fällt mit Punkt M 1 zusammen. Dann x 1 = x 2, y 1 = y 2 und
d = M 1 M 2 = O = .
Unterteilung eines Segments in dieser Hinsicht.
Sei ein beliebiges Segment M 1 M 2 auf der Ebene gegeben und sei M ─ ein beliebiger Punkt davon
 Segment anders als Punkt M 2 (Abb. 1.6). Die Zahl l, definiert durch die Gleichheit l =
Segment anders als Punkt M 2 (Abb. 1.6). Die Zahl l, definiert durch die Gleichheit l =  , angerufen Attitüde, An diesem Punkt teilt M das Segment M 1 M 2.
, angerufen Attitüde, An diesem Punkt teilt M das Segment M 1 M 2.
Satz 1.2. Wenn ein Punkt M(x;y) die Strecke M 1 M 2 im Verhältnis zu l teilt, dann werden die Koordinaten dieses Punktes durch die Formeln bestimmt
x =  , y =
, y =  ,
(4)
,
(4)
wobei (x 1;y 1) ─ Koordinaten von Punkt M 1, (x 2;y 2) ─ Koordinaten von Punkt M 2.
Nachweisen. Beweisen wir die erste der Formeln (4). Die zweite Formel wird auf ähnliche Weise bewiesen. Es gibt zwei mögliche Fälle.
x = x 1 =  =
=  = .
= .
2) Die Gerade M 1 M 2 steht nicht senkrecht zur Ox-Achse (Abb. 1.6). Lassen Sie uns die Senkrechten von den Punkten M 1, M, M 2 auf die Ox-Achse senken und die Punkte ihres Schnittpunkts mit der Ox-Achse als P 1, P, P 2 bezeichnen. Nach dem Satz über proportionale Segmente  = l.
= l.
Weil P 1 P = ôx – x 1 ô, PP 2 = ôx 2 – xô und die Zahlen (x – x 1) und (x 2 – x) haben das gleiche Vorzeichen (bei x 1).< х 2 они положительны, а при х 1 >x 2 sind negativ), dann
l = =  ,
,
x – x 1 = l(x 2 – x), x + lx = x 1 + lx 2,
x = .
Folgerung 1.2.1. Wenn M 1 (x 1;y 1) und M 2 (x 2;y 2) zwei beliebige Punkte sind und Punkt M(x;y) die Mitte des Segments M 1 M 2 ist, dann
x =  , y =
, y =  (5)
(5)
Nachweisen. Da M 1 M = M 2 M, dann ist l = 1 und unter Verwendung der Formeln (4) erhalten wir die Formeln (5).
Fläche eines Dreiecks.
Satz 1.3. Für alle Punkte A(x 1;y 1), B(x 2;y 2) und C(x 3;y 3), die nicht auf demselben liegen
gerade, Bereich S Dreieck ABC ausgedrückt durch die Formel
S = ô(x 2 – x 1)(y 3 – y 1) – (x 3 – x 1)(y 2 – y 1)ô (6)
Nachweisen. Fläche ∆ ABC, dargestellt in Abb. 1,7 berechnen wir wie folgt
 S ABC = S ADEC + S BCEF – S ABFD .
S ABC = S ADEC + S BCEF – S ABFD .
Wir berechnen die Fläche von Trapezen:
S ADEC =  ,
,
S BCEF = 
S ABFD = 
Jetzt haben wir
S ABC = ((x 3 – x 1)(y 3 + y 1) + (x 3 – x 2)(y 3 + y 2) - (x 2 – -x 1)(y 1 + y 2)) = (x 3 y 3 – x 1 y 3 + x 3 y 1 – x 1 y 1 + + x 2 y 3 – -x 3 y 3 + x 2 y 2 – x 3 y 2 – x 2 y 1 + x 1 y 1 – x 2 y 2 + x 1 y 2) = (x 3 y 1 – x 3 y 2 + x 1 y 2 – x 2 y 1 + x 2 y 3 –
X 1 y 3) = (x 3 (y 1 – y 2) + x 1 y 2 – x 1 y 1 + x 1 y 1 – x 2 y 1 + y 3 (x 2 – x 1)) = (x 1 (y 2 – y 1) – x 3 (y 2 – y 1) + +y 1 (x 1 – x 2) – y 3 (x 1 – x 2)) = ((x 1 – x 3)( y 2 – y 1) + (x 1 – x 2)(y 1 – y 3)) = ((x 2 – x 1)(y 3 – y 1) –
- (x 3 – x 1)(y 2 – y 1)).
Für einen anderen Ort ∆ ABC wird Formel (6) auf ähnliche Weise bewiesen, jedoch möglicherweise mit einem „-“-Zeichen. Daher setzen sie in Formel (6) das Modulzeichen ein.
Vorlesung 2.
Gleichung einer Geraden auf einer Ebene: Gleichung einer Geraden mit einem Hauptkoeffizienten, allgemeine Gleichung Gerade, Gleichung einer Geraden in Segmenten, Gleichung einer Geraden, die durch zwei Punkte geht. Der Winkel zwischen Geraden, die Bedingungen der Parallelität und Rechtwinkligkeit von Geraden in einer Ebene.
2.1. Auf der Ebene seien ein rechtwinkliges Koordinatensystem und eine Gerade L gegeben.
Definition 2.1. Eine Gleichung der Form F(x;y) = 0, bezogen Variablen x und y heißen Liniengleichung L(V gegebenes System Koordinaten), wenn diese Gleichung durch die Koordinaten eines beliebigen Punktes erfüllt wird, der auf der Linie L liegt, und nicht durch die Koordinaten eines beliebigen Punktes, der nicht auf dieser Linie liegt.
Beispiele für Geradengleichungen in einer Ebene.
1) Betrachten Sie eine gerade Linie parallel zur Oy-Achse des rechteckigen Koordinatensystems (Abb. 2.1). Bezeichnen wir mit dem Buchstaben A den Schnittpunkt dieser Linie mit der Ox-Achse (a;o) ─ ihr Or-
 Dinats. Die Gleichung x = a ist die Gleichung der gegebenen Geraden. Tatsächlich wird diese Gleichung durch die Koordinaten eines beliebigen Punktes M(a;y) dieser Linie erfüllt und nicht durch die Koordinaten eines beliebigen Punktes, der nicht auf der Linie liegt. Wenn a = 0, dann fällt die Gerade mit der Oy-Achse zusammen, die die Gleichung x = 0 hat.
Dinats. Die Gleichung x = a ist die Gleichung der gegebenen Geraden. Tatsächlich wird diese Gleichung durch die Koordinaten eines beliebigen Punktes M(a;y) dieser Linie erfüllt und nicht durch die Koordinaten eines beliebigen Punktes, der nicht auf der Linie liegt. Wenn a = 0, dann fällt die Gerade mit der Oy-Achse zusammen, die die Gleichung x = 0 hat.
2) Die Gleichung x - y = 0 definiert die Menge der Punkte der Ebene, die die Winkelhalbierenden der Koordinatenwinkel I und III bilden.
3) Die Gleichung x 2 - y 2 = 0 ─ ist die Gleichung zweier Winkelhalbierenden von Koordinaten.
4) Die Gleichung x 2 + y 2 = 0 definiert einen einzelnen Punkt O(0;0) auf der Ebene.
5) Gleichung x 2 + y 2 = 25 ─ Gleichung eines Kreises mit Radius 5 und Mittelpunkt im Ursprung.
THEORETISCHE FRAGEN
ANALYTISCHE GEOMETRIE AUF DER EBENE
1. Koordinatenmethode: Zahlenstrahl, Koordinaten auf einer Linie; rechteckiges (kartesisches) Koordinatensystem auf einer Ebene; Polar Koordinaten.
Betrachten wir eine gerade Linie. Wählen wir darauf eine Richtung (dann wird daraus eine Achse) und einen Punkt 0 (den Koordinatenursprung). Eine Gerade mit gewählter Richtung und Ursprung heißt Koordinatenlinie(Wir gehen davon aus, dass die Skalierungseinheit ausgewählt ist).
Lassen M– ein beliebiger Punkt auf der Koordinatenlinie. Sagen wir es dem Punkt entsprechend M reelle Zahl X, gleich dem Wert OM Segment: x=OM. Nummer X wird als Koordinate des Punktes bezeichnet M.

Somit entspricht jeder Punkt auf der Koordinatenlinie einer bestimmten reellen Zahl – seiner Koordinate. Das Umgekehrte gilt auch: Jede reelle Zahl x entspricht einem bestimmten Punkt auf der Koordinatenlinie, nämlich einem solchen Punkt M, dessen Koordinate x ist. Diese Korrespondenz heißt eins zu eins.
So können reelle Zahlen durch Punkte einer Koordinatenlinie dargestellt werden, d.h. Die Koordinatenlinie dient als Abbild der Menge aller reale Nummern. Daher heißt die Menge aller reellen Zahlen Zahlenstrahl, und jede Zahl ist ein Punkt auf dieser Linie. In der Nähe eines Punktes auf einer Zahlengeraden wird oft eine Zahl angegeben – ihre Koordinate.
Rechteckiges (oder kartesisches) Koordinatensystem auf einer Ebene.
Zwei zueinander senkrechte Achsen Ungefähr x Und Über dich haben allgemeiner Anfang UM und die gleiche Maßeinheit, Form rechteckiges (oder kartesisches) Koordinatensystem auf einer Ebene.
Achse OH nennt man die Abszissenachse, die Achse OY– Ordinatenachse. Punkt UM Der Schnittpunkt der Achsen wird Ursprung genannt. Die Ebene, in der sich die Achsen befinden OH Und OY, heißt Koordinatenebene und wird bezeichnet Ungefähr xy.
Ein rechtwinkliges Koordinatensystem auf einer Ebene stellt also eine Eins-zu-Eins-Entsprechung zwischen der Menge aller Punkte der Ebene und der Menge der Zahlenpaare her, was eine Lösung ermöglicht geometrische Probleme anwenden algebraische Methoden. Die Koordinatenachsen teilen die Ebene in 4 Teile, sie werden genannt in Vierteln, Quadrat oder Koordinatenwinkel.
Polar Koordinaten.
Das Polarkoordinatensystem besteht aus einem bestimmten Punkt UM, angerufen Pole und der von ihm ausgehende Strahl OE, angerufen Polarachse. Darüber hinaus wird die Maßstabseinheit zur Messung der Segmentlängen eingestellt. Lass es gegeben sein Polarsystem Koordinaten und lassen M– beliebiger Punkt der Ebene. Bezeichnen wir mit R– Punktabstand M vom Punkt UM, Und durch φ – der Winkel, um den der Strahl gegen den Uhrzeigersinn gedreht wird, um die Polachse mit dem Strahl auszurichten OM.

Polar Koordinaten Punkte M Rufnummern R Und φ . Nummer R gilt als erste Koordinate und wird aufgerufen Polarradius, Nummer φ – die zweite Koordinate wird aufgerufen Polarwinkel.
Punkt M mit Polarkoordinaten R Und φ
werden wie folgt bezeichnet: M( ;φ). Stellen wir einen Zusammenhang zwischen den Polarkoordinaten eines Punktes und seinen rechtwinkligen Koordinaten her.
In diesem Fall gehen wir davon aus, dass der Ursprung des rechtwinkligen Koordinatensystems am Pol liegt und die positive Halbabszissenachse mit der Polarachse zusammenfällt.


Es sei Punkt M kartesische Koordinaten X Und Y und Polarkoordinaten R Und φ .
| (1) |
Nachweisen.
Von Punkten fallen lassen M 1 Und M 2 Senkrechte M 1 V Und M 1 A,. als (x 2 ; y 2). Nach dem Theorem, wenn M 1 (x 1) Und M 2 (x 2) sind dann zwei beliebige Punkte und α ist der Abstand zwischen ihnen α = |x 2 - x 1 | .
In diesem Artikel gehen wir theoretisch und anhand eines Beispiels auf Möglichkeiten ein, den Abstand von Punkt zu Punkt zu bestimmen spezifische Aufgaben. Lassen Sie uns zunächst einige Definitionen vorstellen.
Yandex.RTB R-A-339285-1 Definition 1
Abstand zwischen Punkten ist die Länge des sie verbindenden Segments im vorhandenen Maßstab. Es ist notwendig, einen Maßstab festzulegen, um eine Längeneinheit zur Messung zu haben. Daher wird das Problem, den Abstand zwischen Punkten zu ermitteln, grundsätzlich durch die Verwendung ihrer Koordinaten auf einer Koordinatenlinie, in einer Koordinatenebene oder im dreidimensionalen Raum gelöst.
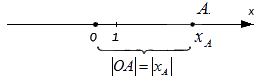
Ausgangsdaten: Koordinatenlinie O x und ein darauf liegender beliebiger Punkt A. Jeder Punkt auf der Linie hat eine Eigenschaft reelle Zahl: Für Punkt A sei dies eine bestimmte Zahl x A, es ist auch die Koordinate von Punkt A.
Im Allgemeinen können wir sagen, dass die Länge eines bestimmten Segments im Vergleich zu einem Segment als Längeneinheit auf einer bestimmten Skala beurteilt wird.
Wenn Punkt A einer ganzzahligen reellen Zahl entspricht, können wir durch sequentielles Ablegen von Segmenten – Längeneinheiten – von Punkt O zu Punkt entlang der Geraden O A die Länge des Segments O A aus der Gesamtzahl der beiseite gelegten Einheitssegmente bestimmen.
Punkt A entspricht beispielsweise der Zahl 3 – um von Punkt O dorthin zu gelangen, müssen Sie drei Einheitssegmente ablegen. Wenn Punkt A die Koordinate -4 hat, werden Einheitssegmente auf ähnliche Weise angeordnet, jedoch in einer anderen, negativen Richtung. Somit ist im ersten Fall der Abstand O A gleich 3; im zweiten Fall O A = 4.
Wenn Punkt A als Koordinate hat Rationale Zahl, dann legen wir vom Ursprung (Punkt O) eine ganze Zahl von Einheitssegmenten beiseite und dann ihren notwendigen Teil. Aber geometrisch ist eine Messung nicht immer möglich. Beispielsweise scheint es schwierig zu sein, den Bruch 4 · 111 auf der Koordinatenlinie darzustellen.
Platzieren Sie es mit der oben beschriebenen Methode auf einer geraden Linie irrationale Zahl und völlig unmöglich. Zum Beispiel, wenn die Koordinate von Punkt A 11 ist. In diesem Fall ist es möglich, sich der Abstraktion zuzuwenden: wenn die gegebene Koordinate von Punkt A Über Null, dann O A = x A (die Zahl wird als Abstand genommen); wenn die Koordinate kleiner als Null ist, dann O A = - x A . Im Allgemeinen gelten diese Aussagen für jede reelle Zahl x A.
Zusammenfassend lässt sich sagen: Der Abstand vom Ursprung zu dem Punkt, der einer reellen Zahl auf der Koordinatenlinie entspricht, ist gleich:
- 0, wenn der Punkt mit dem Ursprung übereinstimmt;
- x A, wenn x A > 0;
- - x A, wenn x A< 0 .
In diesem Fall ist es offensichtlich, dass die Länge des Segments selbst nicht negativ sein kann, daher schreiben wir mit dem Modulzeichen den Abstand von Punkt O zu Punkt A mit der Koordinate x A: O A = x A
Die folgende Aussage wird wahr sein: Der Abstand von einem Punkt zum anderen ist gleich dem Modul der Koordinatendifferenz. Diese. für die Punkte A und B, die für jeden Ort auf derselben Koordinatenlinie liegen und entsprechende Koordinaten haben x A Und x B: A B = x B - x A .

Ausgangsdaten: Punkte A und B liegen auf der Ebene in rechteckiges System Koordinaten O x y s gegebene Koordinaten: A (x A , y A) und B (x B , y B) .
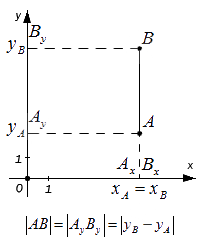
Zeichnen wir Senkrechten durch die Punkte A und B zu den Koordinatenachsen O x und O y und erhalten als Ergebnis die Projektionspunkte: A x, A y, B x, B y. Basierend auf der Lage der Punkte A und B sind dann folgende Optionen möglich:
Wenn die Punkte A und B zusammenfallen, ist der Abstand zwischen ihnen Null;
Liegen die Punkte A und B auf einer Geraden senkrecht zur O x-Achse (Abszissenachse), dann fallen die Punkte zusammen und | A B | = | A y B y | . Da der Abstand zwischen den Punkten gleich dem Modul der Differenz ihrer Koordinaten ist, gilt A y B y = y B - y A und daher A B = A y B y = y B - y A.
Liegen die Punkte A und B auf einer Geraden senkrecht zur O y-Achse (Ordinatenachse) – analog zum vorherigen Absatz: A B = A x B x = x B – x A

Wenn die Punkte A und B nicht auf einer Geraden senkrecht zu einer der Koordinatenachsen liegen, ermitteln wir den Abstand zwischen ihnen, indem wir die Berechnungsformel ableiten:
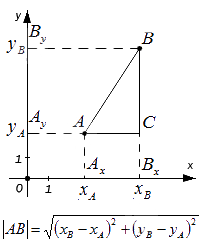
Wir sehen, dass das Dreieck A B C rechteckig aufgebaut ist. In diesem Fall ist A C = A x B x und B C = A y B y. Mit dem Satz des Pythagoras erstellen wir die Gleichheit: A B 2 = A C 2 + B C 2 ⇔ A B 2 = A x B x 2 + A y B y 2 und transformieren sie dann: A B = A x B x 2 + A y B y 2 = x B - x A 2 + y B - y A 2 = (x B - x A) 2 + (y B - y A) 2
Lassen Sie uns aus dem erhaltenen Ergebnis eine Schlussfolgerung ziehen: Der Abstand von Punkt A zu Punkt B in der Ebene wird durch Berechnung mit der Formel unter Verwendung der Koordinaten dieser Punkte bestimmt
A B = (x B - x A) 2 + (y B - y A) 2
Die resultierende Formel bestätigt auch zuvor gemachte Aussagen für Fälle des Zusammentreffens von Punkten oder für Situationen, in denen die Punkte auf Geraden senkrecht zu den Achsen liegen. Wenn also die Punkte A und B zusammenfallen, gilt die folgende Gleichheit: A B = (x B – x A) 2 + (y B – y A) 2 = 0 2 + 0 2 = 0
Für eine Situation, in der die Punkte A und B auf einer geraden Linie senkrecht zur x-Achse liegen:
A B = (x B – x A) 2 + (y B – y A) 2 = 0 2 + (y B – y A) 2 = y B – y A
Für den Fall, dass die Punkte A und B auf einer Geraden senkrecht zur Ordinatenachse liegen:
A B = (x B – x A) 2 + (y B – y A) 2 = (x B – x A) 2 + 0 2 = x B – x A
Ausgangsdaten: rechteckiges Koordinatensystem O x y z mit darauf liegendem beliebige Punkte mit gegebenen Koordinaten A (x A, y A, z A) und B (x B, y B, z B). Es ist notwendig, den Abstand zwischen diesen Punkten zu bestimmen.
Lassen Sie uns überlegen Allgemeiner Fall, wenn die Punkte A und B nicht in einer Ebene parallel zu einer der beiden liegen Koordinatenebenen. Zeichnen wir Ebenen senkrecht zu den Koordinatenachsen durch die Punkte A und B und erhalten wir die entsprechenden Projektionspunkte: A x , A y , A z , B x , B y , B z

Der Abstand zwischen den Punkten A und B ist die Diagonale des resultierenden Parallelepipeds. Entsprechend der Konstruktion der Maße dieses Parallelepipeds: A x B x , A y B y und A z B z
Aus dem Geometriekurs ist bekannt, dass das Quadrat die Diagonale eines Parallelepipeds ist gleich der Summe Quadrate seiner Maße. Basierend auf dieser Aussage erhalten wir die Gleichheit: A B 2 = A x B x 2 + A y B y 2 + A z B z 2
Unter Verwendung der zuvor gewonnenen Schlussfolgerungen schreiben wir Folgendes:
A x B x = x B - x A , A y B y = y B - y A , A z B z = z B - z A
Lassen Sie uns den Ausdruck umwandeln:
A B 2 = A x B x 2 + A y B y 2 + A z B z 2 = x B - x A 2 + y B - y A 2 + z B - z A 2 = = (x B - x A) 2 + (y B - y A) 2 + z B - z A 2
Finale Formel zur Bestimmung des Abstands zwischen Punkten im Raum wird so aussehen:
A B = x B – x A 2 + y B – y A 2 + (z B – z A) 2
Die resultierende Formel gilt auch für Fälle, in denen:
Die Punkte fallen zusammen;
Auf einem liegen Koordinatenachse oder eine gerade Linie parallel zu einer der Koordinatenachsen.
Beispiele für die Lösung von Problemen beim Ermitteln des Abstands zwischen Punkten
Beispiel 1Ausgangsdaten: Gegeben sind eine Koordinatenlinie und darauf liegende Punkte mit den gegebenen Koordinaten A (1 - 2) und B (11 + 2). Es ist notwendig, den Abstand vom Ursprungspunkt O zum Punkt A und zwischen den Punkten A und B zu ermitteln.
Lösung
- Der Abstand vom Referenzpunkt zum Punkt ist gleich dem Modul der Koordinate dieses Punktes bzw. O A = 1 - 2 = 2 - 1
- Wir definieren den Abstand zwischen den Punkten A und B als Modul der Differenz zwischen den Koordinaten dieser Punkte: A B = 11 + 2 – (1 – 2) = 10 + 2 2
Antwort: O A = 2 - 1, A B = 10 + 2 2
Beispiel 2
Ausgangsdaten: Gegeben sind ein rechteckiges Koordinatensystem und zwei darauf liegende Punkte A (1, - 1) und B (λ + 1, 3). λ ist eine reelle Zahl. Es müssen alle Werte dieser Zahl gefunden werden, bei denen der Abstand A B gleich 5 ist.
Lösung
Um den Abstand zwischen den Punkten A und B zu ermitteln, müssen Sie die Formel A B = (x B - x A) 2 + y B - y A 2 verwenden
Ersetzen echte Werte Koordinaten erhalten wir: A B = (λ + 1 - 1) 2 + (3 - (- 1)) 2 = λ 2 + 16
Wir verwenden auch die bestehende Bedingung, dass A B = 5 und dann ist es so wahre Gleichheit:
λ 2 + 16 = 5 λ 2 + 16 = 25 λ = ± 3
Antwort: A B = 5, wenn λ = ± 3.
Beispiel 3
Ausgangsdaten: Ein dreidimensionaler Raum wird im rechteckigen Koordinatensystem O x y z und den darin liegenden Punkten A (1, 2, 3) und B - 7, - 2, 4 angegeben.
Lösung
Um das Problem zu lösen, verwenden wir die Formel A B = x B – x A 2 + y B – y A 2 + (z B – z A) 2
Wenn wir reale Werte ersetzen, erhalten wir: A B = (- 7 - 1) 2 + (- 2 - 2) 2 + (4 - 3) 2 = 81 = 9
Antwort: | A B | = 9
Wenn Sie einen Fehler im Text bemerken, markieren Sie ihn bitte und drücken Sie Strg+Eingabetaste










